 |
|
Adaptive, Fast, Dynamic
Walking Robot"RunBot"
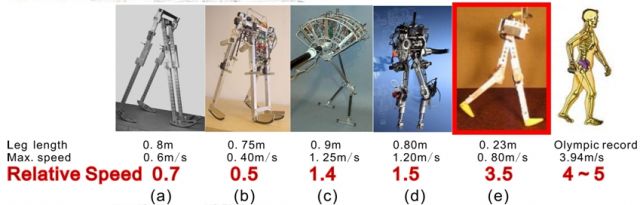
RunBot* is a biomechatronic design. It has achieved a relative walking speed of 3.5 leg-lengths per second, which is tremendously faster than the current world record of biped walking robots, 1.5 leg-lengths per second, and is even comparable to the fastest relative speed of human walking. Unlike other biped robots using various model-based controllers, RunBot's mechanical structure (Biomechanical level) is directly driven by motor-neurons of its reflexive neuronal controller (Spinal reflex level), which is analogous to what happens in human and animals' walking. In addition, we simulate a mechanism for synaptic plasticity (Postural reflex level) which allows RunBot to autonomously learn to adapt its locomotion to different terrains, e.g. level floor versus up or down a ramp. As a result, the structural coupling of all these levels generates adaptive, fast dynamic walking of RunBot.
*RunBot has been originally developed byDr. Tao Geng |
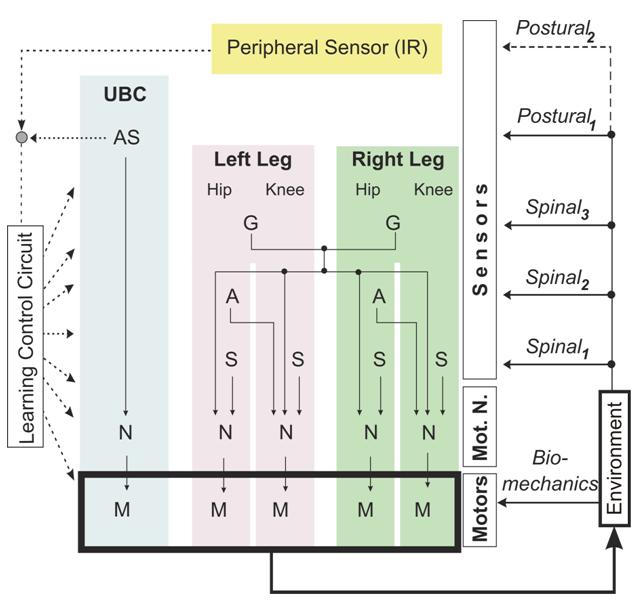
The RunBot architecture has been designed in general following the classical subsumption architecture.We divide our robot system into three levels (Biomechanical, Spinal Reflex, and Postural Reflex Levels) where they are organized as a hierarchicalstructure and coupled via the environment.
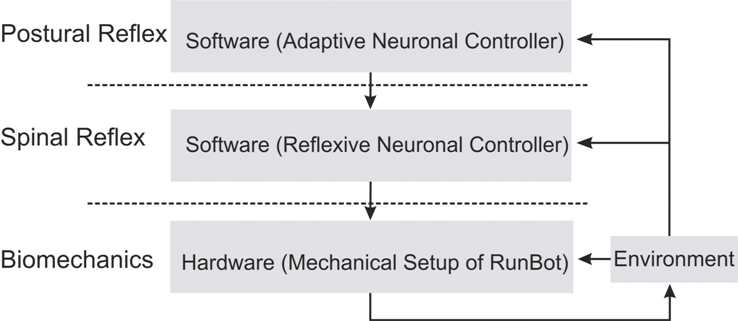
The walker requires an appropriate biomechanical design, which may use some principles of passive walkers to assure stability.
 |
|
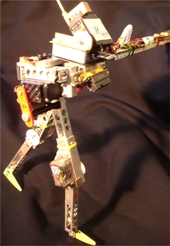
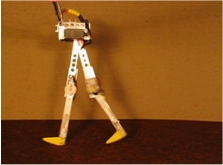
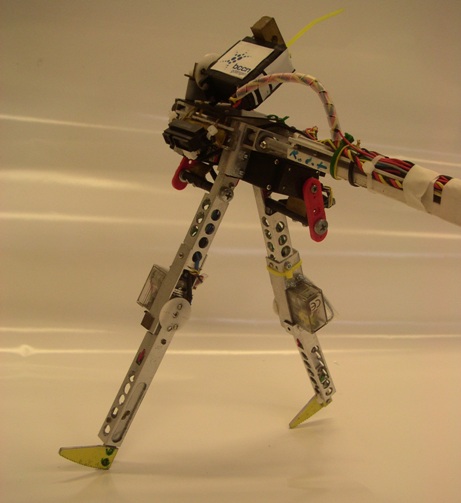
It is 23 cm tall, foot to hip joint axis. Each leg consists of two degrees of freedom: hip and knee joints. Each hip joint is driven by a modified RC servo motor producing a torque up to 5.5 kg.cm while the motor of each knee joint produces a smaller torque (3 kg.cm) but has fast rotating speed with 21 rad/s. The built-in servo control circuits of the motors are disconnected while the built-in potentiometer is used to measure the joint angles. A mechanical stopper is implemented on each knee joint to prevent it from going into hyperextention similar to human kneecaps.
Runbot has no actuated ankle joints resulting in very light feet and being efficient for fast walking. Its feet were designed having a circular form 4.5 cm long similar to passive biped robots. Each foot is equipped with a switch sensor to detect ground contact. This mechanical design of Runbot has some special features, e.g. small curved feet and a properly positioned center of mass that allow the robot to perform natural dynamic walking during some stage of its gait cycles. |
 |
|
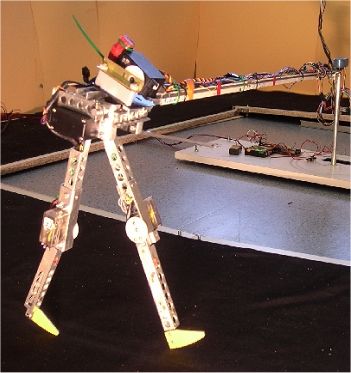
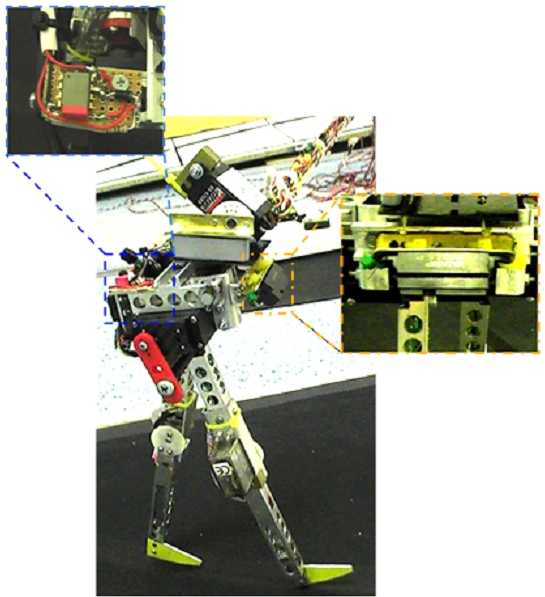
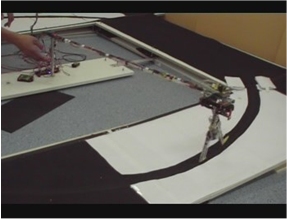
In addition, the active upper body component is implemented on the top of its hip joints for balance in walking on different terrains, e.g. up and down slopes. The active body has the total weight of 50 g. The active component is controlled by an accelerometer sensor implemented beside one hip joint. In order to effectively perform adaptive walking on different terrains, one infrared-based vision sensor is also installed at the hip joints and it points down forwards to detect the slope. The sensor signal serves as predictive signal in the adaptive control level. Runbot is constrained sagitally by a boom of one meter length. It is attached to the boom via a freely-rotating joint in the x axis while the boom is attached to the central column with freely-rotating joints in the y and z axes. Thus, the motions of Runbot are only constrained on a circular path. This set-up has no influence on dynamics of Runbot in the sagittal plane. |
 |
|
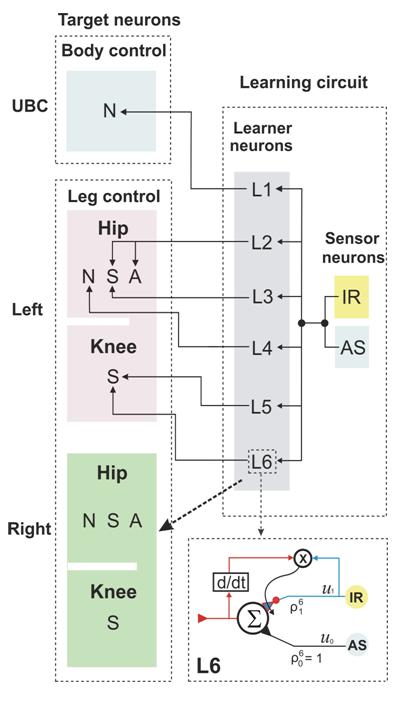
The adaptive neuronal controller is composed of six learner neurons (L1,2,...,6) which converge onto target neurons at the reflexive networks in the spinal reflex level changing their activation parameters. In our learning algorithm, the modification of all those parameters will be controlled by two kinds of input signals: one is an early input (called predictive signal (IR)) and the other is a later input (called reflex signal (AS)). This adaptive control will finally enable RunBot to learn to walk up a ramp and then continue again on a level floor. |
(For more details of RunBot and its controller, read the papers)
 Video1 Video1 |
|
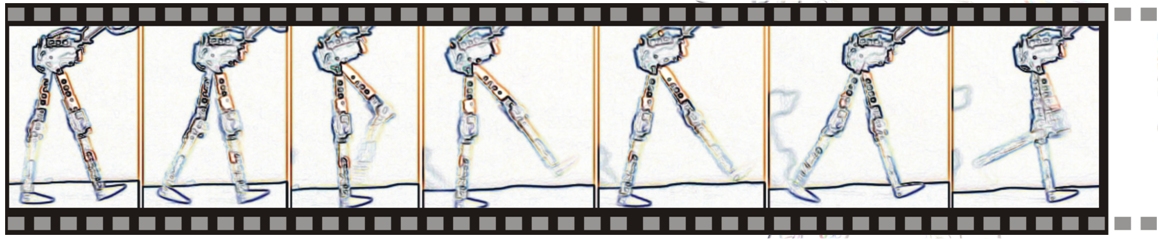
Changing speed on the fly by tuning the neuron parameters, you can see RunBot's gaits are quite natural, like human's walking gaits. (its fastest walking speed is about 3.5 leg-lengths per second) |
 Video2 Video2 |
|
In this video, RunBot started from a slow gait. A real-time reinforcement learning algorithm is used to tune the neuron parameters online while RunBot is walking. At the end of the video, RunBot attained its fastest walking speed. |
Comparison of the Walking Speed of various biped robots whose sizes, they are quite different from each other, we use the relative speed, speed divided by the leg-length. The figure below shows the relative speed of some typical planar biped robots, RunBot, and human.
- Dynamic Walking on Different Terrains
 Video3 Video3 |
|
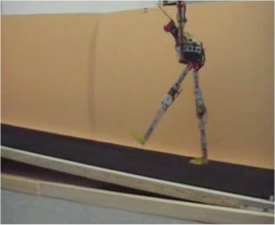
The dynamic walking capability of Runbot on different terrains, e.g. level floor, up and down slopes up between 0 and 8 degrees. |
- Learning to Walk up Slope (adaptive walking)
 |
Video4
Video5
Video6
Video7
Video8 |
|
RunBot learns to walk up slope. As a result, it can learn to adapt its walking gait together with leaning the body. |


Publications
Manoonpong, P.; Woergoetter, F. (2009) Efference Copies in Neural Control of Dynamic Biped Walking. Robotics and Autonomous Systems,Elsevier Science, Vol 57(11), pp. 1140-1153. (pdf)(JIF = 1.214)(November 2009) [Supplmentary video]
Manoonpong P., Woergoetter F. (2008) Using efference copy for external and self-generated sensory noise cancellation, Proceedings of 4th International Symposium on Adaptive Motion of Animals and Machines (AMAM2008), Case Western Reserve University, Cleveland OH-USA, June 1-6 2008, pp. 227-228.(pdf)
Manoonpong, P.; Geng, T.; Kulvicius, T.; Bernd Porr; Woergoetter, F. (2007). Adaptive, Fast Walking in a Biped Robot under Neuronal Control and Learning. PLoS (Public Library of Science) Computational Biology (PLoS Comput Biol), 3(7), e134. doi:10.1371/journal.pcbi.0030134(pdf)
Manoonpong, P.; Geng, T.; Bernd Porr; Woergoetter, F. (2007). The RunBot Architecture for Adaptive, Fast, Dynamic Walking. In: Proceedings of the 2007 IEEE International Symposium on Circuits and Systems (ISCAS), SPECIAL SESSION: Live Demonstrations of Circuits & Systems, on CD-ROM and the IEEE Xplore system, New Orleans, USA, May 27-30, 2007. (pdf)
Manoonpong, P.; Geng, T.; Woergoetter, F. (2007). Neuronal Control and Learning for Adaptive, Fast Dynamic Walking of the Biped Robot "RunBot". In: Proceedings of the 7th Meeting of the German Neuroscience Society (G�ttingen Neurobiology Conference), Abstract on CD, T37-8B, 29 March � 1 April, G�ttingen, Germany, 2007. (pdf)
Manoonpong, P.; Geng, T.; Woergoetter F. (2006). Exploring the dynamic walking range of the biped robot "Runbot" with an active upper-body component. In: Proceedings of the Sixth IEEE-RAS International Conference on Humanoid Robots (Humanoids 2006), pp.418-424 , 4 � 6 December, Genova, Italy. (pdf)
Geng, T.; Porr, B.; W�rg�tter, F. (2006). Fast Biped Walking with A Sensor-driven Neuronal Controller and Real-time Online Learning. The International Journal of Robotics Research (IJRR), vol. 25, no.3, pp. 243-259, March 2006.(pdf)
Geng, T.; Porr, B.; W�rg�tter, F. (2006). A Reflexive Neural Network for Dynamic Biped Walking Control, Neural Computation, vol. 18, no. 5, pp. 1156-1196, May 2006, MIT press.(pdf)




 pdf
pdf 






 pdf
pdf
 pdf
pdf  pdf
pdf





