|
Manoonpong, P. Neural Preprocessing and Control of Reactive Walking Machines: Towards Versatile Artificial Perception-Action Systems (Cognitive Technologies) (Hardcover), Springer-Verlag, (published 2007, in English)
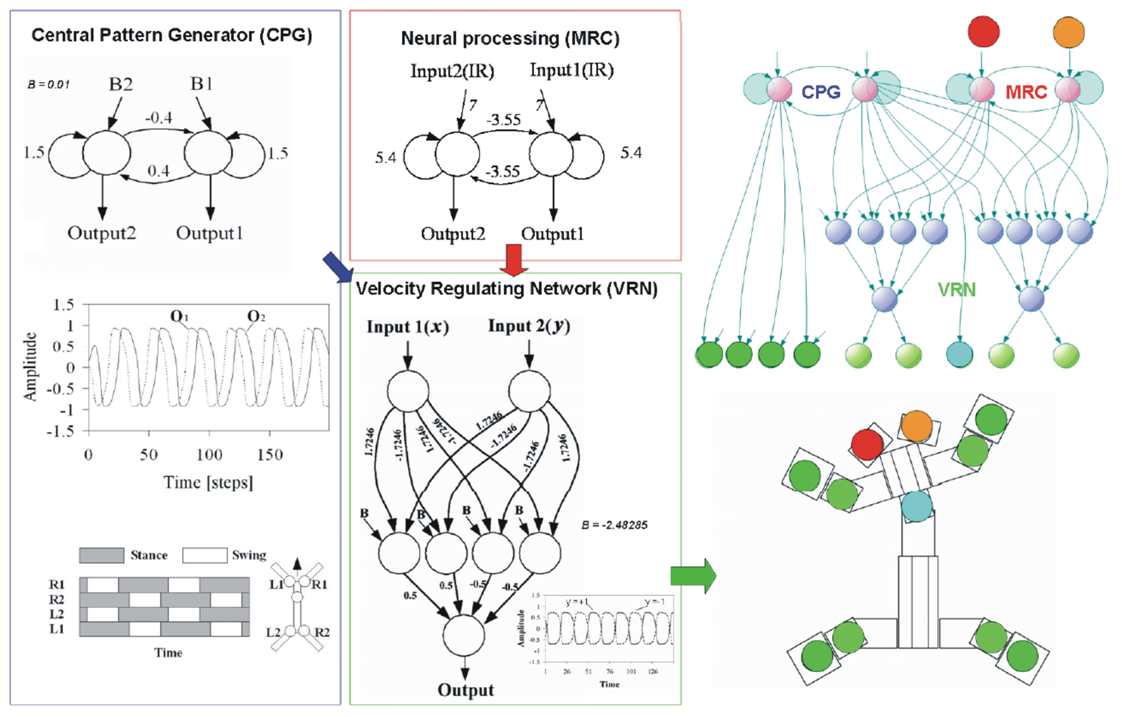
Manoonpong, P.; Pasemann, F.; Roth, H. (2007). Modular reactive neurocontrol for biologically-inspired walking machines. The International Journal of Robotics Research, vol. 26, no. 3, pp. 301-331, DOI: 10.1177/0278364906076263 (pdf) ("The final, definitive version of this paper has been published in IJRR, 3, March/2007 by Sage Publications Ltd, All rights reserved. © SAGE Publications Ltd, year of publication. It is available at: http://online.sagepub.com/ ") , http://ijr.sagepub.com/(Multimedia files: Extension1, Extension2)
Manoonpong, P.; Pasemann, F.; Fischer, J.; Roth, H. (2005). Neural processing of auditory signals and modular neural control for sound tropism of walking machines. International Journal of Advanced Robotic Systems (ARS), ISSN: 1729-5506, vol. 2, no. 3, pp. 223–234. (one of the best publications of the month at Fraunhofer AIS) (pdf)
Manoonpong, P.; Pasemann, F.; Fischer, J. (2005). Modular neural control for a reactive behavior of walking machines. In: Proceedings of the Sixth IEEE Symposium on Computational Intelligence in Robotics and Automation (CIRA 2005), ISBN: 0-7803-9355-4, Helsinki University of Technology, Finland, pp. 403–408. (pdf)
Manoonpong, P.; Pasemann, F.; Fischer, J. (2004). Neural processing of auditory-tactile sensor data to perform reactive behavior of walking machines. In: Proceedings of the IEEE International Conference on Mechatronics and Robotics (MechRob ’04), Achen, Germany, ISBN: 3-938153-50-X, vol. 1, pp. 189–194. (pdf)
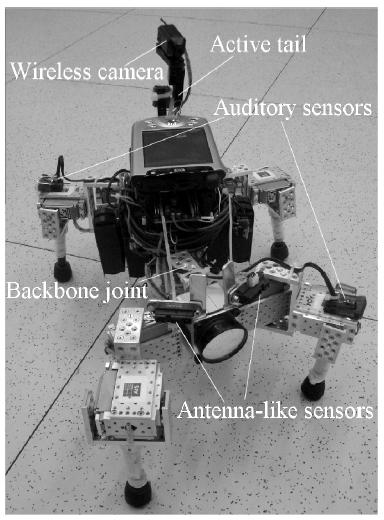
Manoonpong, P.; Pasemann, F. (2005). Advanced mobility sensor driven-walking device 02 (AMOS-WD02). In: Proceedings of the Third International Symposium on Adaptive Motion in Animals and Machines, Robot data sheet, Ilmenau: ISLE, ISBN: 3-938843-03-9, p. R22. (pdf) |