Research Topics:
Current Projects
MAESTRI (DK)
The Marie Skłodowska-Curie Actions-Doctoral Networks: MAgnEtic SofT matter for RobotIcs” (MAESTRI) (1 March 2024 - 29 February 2028)
BRAIN (TH)
Startup Grant-IST Flagship researches of VISTEC: Bio-inspired Robotics & Neural Engineering (BRAIN)

Past Projects
LOFT (DK)
Odense Robotics: Long-term autOnomy For service robots in consTruction (LOFT)
ADLife (DK)
THOMAS B. THRIGES FOND: Advanced machine learning research platform for autonomous lifelong learning of complex robotic systems in dynamically changing real-world environments (ADLife)
STARBOT (CH-DE)
NSFC-DFG: Bio-inspired Smart Attachment and Adaptive Neuromechanical Control for Highly Efficient Locomotion and Adaptation to an Autonomous Climbing Robot
DLife (EU)
Human Frontier Science Program (HFSP): A dung beetle’s
life: how miniature creatures perform extraordinary feats with limited resources
NEUTRON (CH)
1000-plan Program for Young Professionals of China: NEUrorobotic Technology for advanced Robot mOtor coNtrol (NEUTRON)

Plan4Act (EU)
Horizon2020-FETPROACT: Predictive Neural Information for Proactive Actions:
From Monkey Brain to Smart House Control
SMOOTH (DK)
Innovation
fund Denmark: Seamless huMan-robot interactiOn fOr THe support of elderly
people

HealthCAT (EU)
Interreg5:
Health Care Assisting Technology

VISRA (TH)
PTT-RAII and VISTEC:AdVanced Human-MachIne InteractionS Technology for ImpRoving QuAlity of Life and Health (VIS–RA)
WELFARE ROBOTS (DK)
SDU Lighthouse initiative: Welfare Robots
Neural Control, Memory, and Learning for Complex
Behaviors in Multi-sensori Robotic Systems

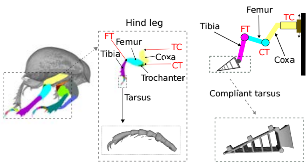
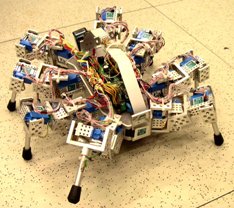
Dung beetle legs
Bio-inspired legs with adaptie
CPG-based neural control for locomotion
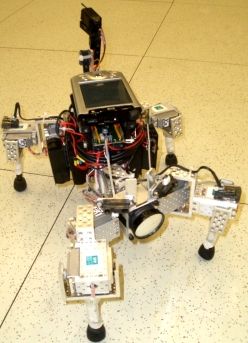
DACBot
A Dynamic, Adaptive, Compliant walking robot (a next generation of RunBot)

Biomechanics with neural control, memory, and learning for complex behaviors

Biomechanics with neural control and learning for adaptive, dynamic walking behavior of a biped

Neural preprocessing and control for obstacle avoidance and sound tropism
Neural preprocessing and control with learning for versatile reactive behaviors

Neural preprocessing and control for omidirectional walking and reflex action
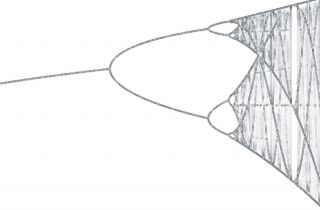
Chaos Control
Simple neural chaotic pattern generator for complex behaviors of walking robots in a complex environment
Reconfigurable Robot
Modular neural control for multi locomotion of a three-legged reconfigurable robot with omnidirectional wheels
( in collaboration with Assoc. Prof. Laksanachareon, KMUTNB, see Publications
[1],
[2],
[3] &
videos)

Biomechanical Leg
Modular neural control with a neural reflex mechanism for generating huma-like locomotion of the biomechanical leg
(in collaboration with Locomotion Lab, TU Darmstadt,
see Publications [1],
[2] &
video)
Different types of robots including wheeled and legged robots developed in the past
Electronic soundsynthesizer for nonlinear
tonepatterns on 6 channels systems -stereo
vision (in collaboration with Rainer Dunkel & Marc Timme)
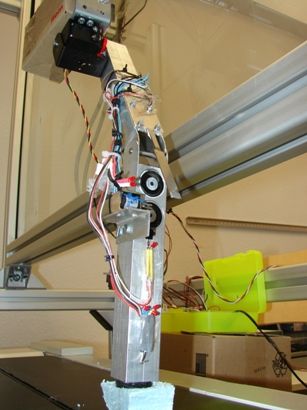
Technology transfer
Besides robot developments & implementations, our
developed neural mechanisms have been also used as useful building blocks
(generalization and transferable) for other module-based neural control to solve
coordination problems in other complex motor tasks. For instance, in
collaboration with Otto Bock HealthCare, we have transferred and implemented the
already demonstrated operational neural mechanisms to a Knee-Ankle-Foot-Orthosis
(left figure) to allow for adaptation (1) to changing environments like slopes,
stairs etc. and (2) to the physiological condition of the individual patient
(see Publications
[1],
[2],
[3], [4],
[5],
[6], video).
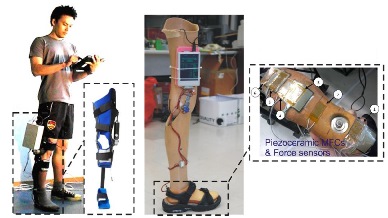
In collaboration with National Electronics and Computer
Technology Center (NECTEC, Thailand) and Ronsek LTD in UK, our developed neural
mechanisms have been employed as models of the energy harvesting system of
prosthetic legs (right figure). The models serve to study and analyze dynamical
behaviors of the piezoelectric materials with respect to walking behavior (see
Publications
[1],
[2],
[3], [4],
[5]).
Top of Page
|